29 Palms Fixed/Mobile Experiment
Tracking vehicles with a UAV-delivered sensor network.
UC Berkeley and MLB Co
March 12-14
Marine Corps Air/Ground Combat Center (MCAGCC)
Twentynine Palms, CA



Goal
The goals of the experiment were to
-
Deploy a sensor network onto a road from an unmanned aerial vehicle (UAV).
-
Establish a time-synchronized multi-hop communication network among the
nodes on the ground.
-
Detect and track vehicles passing through the network.
-
Transfer vehicle track information from the ground network to the UAV.
-
Transfer vehicle track information from the UAV to an observer at the base
camp.
Details are below, or you can just skip to the results.
Background
People have been talking about combining MEMS sensors with wireless communication
for about a decade. The Smart
Dust effort at Berkeley is one of the many projects in this area.
As a part of Smart Dust, we implemented wireless sensor nodes using off-the-shelf
components in custom boards. The nodes, known as macro-motes or just
motes, are about a cubic inch in volume and contain sensors, a microprocessor,
RF comm., and a battery or solar cell for power. David Culler and
his students got interested in these platforms through our interaction
on the Endeavour
project, and quickly wrote an operating system called TinyOS.
A new family of modular nodes was designed by the TinyOS/Dust team, and
it was good. :)
Shankar Sastry and Kannan Ramchandran felt that there were interesting
theoretical issues to be studied in the operation of distributed sensor
networks, and wrote a proposal on Sensorwebs
which was ultimately funded (under SensIT) after Shankar had already left
for DARPA (to run ITO). Having been cajoled into being a co-PI on
Sensorwebs, I was a natural target when Sri Kumar, the SensIT PM, called
in June 2000 and asked for "a fixed/mobile demo" from our theoretical team!
Leveraging on the work done in Dust and Endeavour, and with some additional
funding from Sri, we pulled it off in 9 months.
Sensor Node Hardware
The sensor nodes consist of a motherboard (Rene), a sensor board, and a
power supply board. The motherboard has a microprocessor, 916.5 MHz
OOK radio, and support circuitry. The power supply board currently
sports just a battery connector. The sensor board has a 2 axis Honeywell
HMC1002 magnetometerwith
roughly 1mGauss resolution. All three boards and the lithium battery
weigh just under 1 ounce. The basic nodes can be purchased from Crossbow.
Battery life varies depending on what's powered up. With everything
on, the life is just an hour. With the magnetometer off, and the
radio turned on only once a second to check for messages, the lifetime
is many days.
The complete mote and two motes as attractively packaged for dropping
and two motes as attractively packaged for dropping .
.
The magnetometer board has an amplifier and a software-controlled output
nulling feature (to trim out the DC component of the earth's magnetic field
so that it doesn't saturate the amplifier/ADC). Magnetic materials
moving near the magnetometer cause a change in the earth's field, and this
change is what the motes detect. The magnetometer signal is sampled
at 5 Hz.
The motes are able to detect passenger vehicles at more than 5 meters,
and buses and trucks at more than 10 meters. We didn't do any range
experiments in the desert, but had no trouble tracking any of the vehicles
at distances of 10 meters and more. A typical magnetometer signal
is shown below.
 The
green trace is the raw signal, yellow is low-pass filtered signal, and
red is high-pass filtered yellow. The vertical lines mark the start/stop
points of the mote's determination that a vehicle is present.
The
green trace is the raw signal, yellow is low-pass filtered signal, and
red is high-pass filtered yellow. The vertical lines mark the start/stop
points of the mote's determination that a vehicle is present.
Aircraft
The aircraft is a 5' wingspan fully autonomous GPS controlled pusher-prop
built by MLB Co. A custom mote-dropper
was built, including an integrated camera to view the motes as they are
dropped. The plane has a color video camera in the nose, and transmits
to an auto-tracking ground station from a distance of up to two miles.
The range of the aircraft as configured in the demo was 30 minutes, or
15 miles. Video range is currently 2 miles. Top speed is 60 mph.


These pictures are low-res versions of photos that were taken by the
UAV.
 Two
views of the basecamp where the UAV was launched, and the VIPs watched
the show.
Two
views of the basecamp where the UAV was launched, and the VIPs watched
the show.

 A
HMMWV and a Dragon Wagon, two of our typical targets near the intersection.
Jason and Steve prepare the mote dropper for a launch.
A
HMMWV and a Dragon Wagon, two of our typical targets near the intersection.
Jason and Steve prepare the mote dropper for a launch. The
motes know the order that they will be dropped in, and use that for an
initial guess at their relative locations, which they update as they get
more track information.
And we still had 80 bytes of program memory left!
The
motes know the order that they will be dropped in, and use that for an
initial guess at their relative locations, which they update as they get
more track information.
And we still had 80 bytes of program memory left!
Results
It worked!
Over the course of the three day experiment, just about everything that
could go wrong did go wrong, but ultimately we demonstrated everything
that we set out to demonstrate.
Monday March 12
-
The hand-emplaced network of 8 sensor nodes detected HMMWVs, LAVs, trucks,
dragon wagons, SUVs, etc. Anything that drove by was tracked, and
the network generated a direction and velocity estimate. We haven't
checked any ground-truth on the velocities, but all of the directions were
correct, and velocities matched our visual estimates.
-
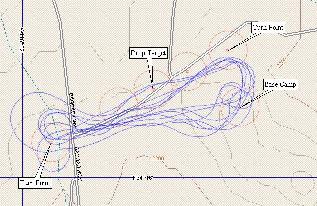
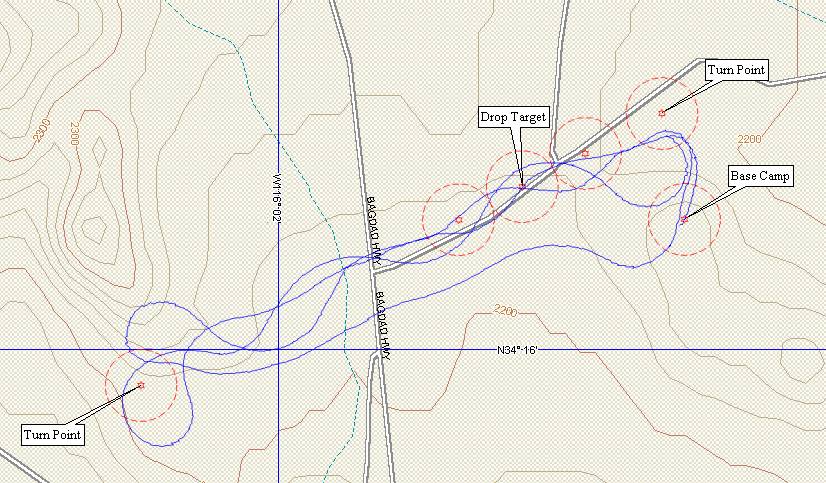
The UAV flew autonomously (course plot:
 )
and dropped six motes from an altitude of 150 ft and a velocity of 30 mph.
The motes landed diagonally across the road on roughly 5 meter centers.
Perfect!
)
and dropped six motes from an altitude of 150 ft and a velocity of 30 mph.
The motes landed diagonally across the road on roughly 5 meter centers.
Perfect!
-
Unfortunately, the batteries in the dropped motes had died because of several
false starts in launching the UAV.
Software re-writes keep the TinyOS team up until 3am. Mote power
consumption drops by a factor of 2 with the new software!
Tuesday March 13
-
Everything goes wrong. We won't say anything more about tuesday.
Wednesday March 14
-
The UAV autonomously delivers 6 motes on 5 meter centers again. Motes
are 20 meters from the road, but in a perfect pattern.
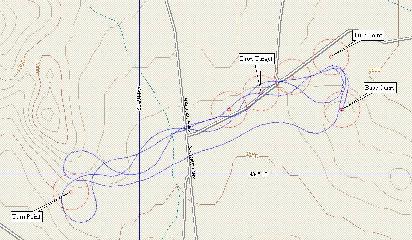
-
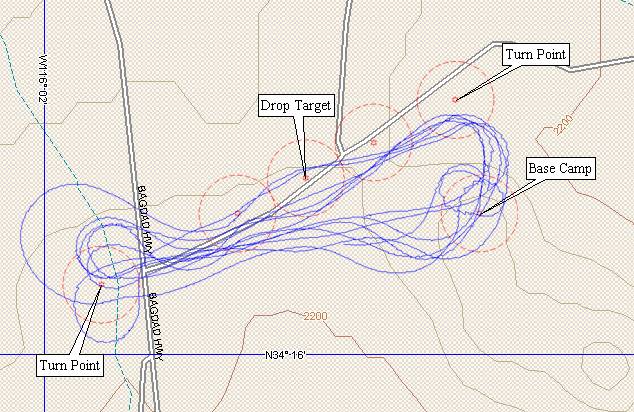
UAV course
and altitude.
Compare to the course plot above and you can tell that the winds were worse
on wednesday. Altitude is zero at basecamp, drops a bit when Steve
first throws the UAV from the top of the hill, and ends up at about -50
ft on landing near the intersection. "Bombing" runs are at 100 ft
elevation relative to the hilltop, 150ft from the intersection.
-
Here's the video from the mote drop as seen from the UAV
-
Once on the ground, the network of 6 motes synchronized their clocks and
waited for a vehicle to pass.
-
We had a dragon wagon drive "a little" off of the road (on the other side
of the berm next to the road).
-
The motes detected the dragon wagon, passed their "closest time of approach"
information around by multi-hop messaging, calculated the best least-squares
fit to the data, and stored it.
-
The UAV returned and transmitted a query to the ground network, which responded
with the track information: 4 fps at 11:31AM
-
The UAV flew over the base camp and transmitted the track information down
to a mote connected to a laptop. Success!
Other photos
Sri Kumar and Steve Morris; Kris Pister, Sri, and future motes; an
LAV and an M1 tank (photos from the summer 00 experiment) ; Rob Szewczyk
snoops on the ground network traffic with a couple of Majors.





The future
There is nothing in the current motes that can not be miniaturized.
In three years this demo will be done with a 6" aircraft, and millimeter-scale
sensor nodes.
Participants and Sponsors
David Culler, UCB; Co-PI Endeavour (ITO)
Lance Doherty; Sensorwebs/algorithms; ldoherty@eecs.berkeley.edu
Jason Hill; Endeavour/TinyOS software and mote hardware; jhill@eecs.berkeley.edu
Mike Holden, MLB; flight software; mike@spyplanes.com
Charlie Kiers; Marine liaison to DARPA; pmpax@nosc.mil
Sri Kumar; DARPA/ITO; PM SensIT; skumar@darpa.mil
Julius Kusuma; Sensorwebs/algorithms; kusuma@eecs.berkeley.edu
Steve Morris, MLB; PI sub contracts of Smart Dust and Sensorwebs; mlbco@sirius.com
Kris Pister, UCB; PI Smart Dust (MTO); Co-PI, Sensorwebs (ITO); pister@eecs.berkeley.edu
Kannan Ramchandran, UCB; Co-PI, Sensorwebs (ITO); kannanr@eecs.berkeley.edu
Brian Robbins, MLB; aircraft mechanical
Jean Scholtz; DARPA/ITO; PM Ubiquitous computing; jscholtz@darpa.mil
Mike Scott; Sensorwebs/mote hardware; mdscott@eecs.berkeley.edu
Rob Szewczyk; Endeavour/TinyOS; szewczyk@eecs.berkeley.edu
Bill Tang; DARPA/MTO; PM MEMS; wtang@darpa.mil
Alec Woo; Endeavour/TinyOS; awoo@eecs.berkeley.edu




 and two motes as attractively packaged for dropping
and two motes as attractively packaged for dropping The
green trace is the raw signal, yellow is low-pass filtered signal, and
red is high-pass filtered yellow. The vertical lines mark the start/stop
points of the mote's determination that a vehicle is present.
The
green trace is the raw signal, yellow is low-pass filtered signal, and
red is high-pass filtered yellow. The vertical lines mark the start/stop
points of the mote's determination that a vehicle is present.



 Two
views of the basecamp where the UAV was launched, and the VIPs watched
the show.
Two
views of the basecamp where the UAV was launched, and the VIPs watched
the show.

 A
HMMWV and a Dragon Wagon, two of our typical targets near the intersection.
A
HMMWV and a Dragon Wagon, two of our typical targets near the intersection.
 The
motes know the order that they will be dropped in, and use that for an
initial guess at their relative locations, which they update as they get
more track information.
The
motes know the order that they will be dropped in, and use that for an
initial guess at their relative locations, which they update as they get
more track information.
 )
and dropped six motes from an altitude of 150 ft and a velocity of 30 mph.
The motes landed diagonally across the road on roughly 5 meter centers.
Perfect!
)
and dropped six motes from an altitude of 150 ft and a velocity of 30 mph.
The motes landed diagonally across the road on roughly 5 meter centers.
Perfect!




{kind=link}
{kind=link}